内容简介:Hi Giorgio congratulations and all the best for this awesome project.
Giorgio_Rinolfi (Giorgio Rinolfi) #1
Ciao community!
We have a vision and we would like to bring you on board to make it happen!
Let’s build the smallest integrated ArduCopter with outstanding flight time ! We call it ArduBee .
This tiny ArduPilot UAV will enable initiatives of education and research or just everyone who wants to play with state-of-the-art technology and to explore the field of aerial applications.
We really believe it could be a great opportunity for our beloved ArduPilot community to get the best possible drone dev kit.
[direct link to ArduBee micro drone project page]
Our Story begins long ago…
We have been learning with ArduPilot since our first DIY flying quad and our first RC piloting experience and since then, the idea undergoing this first flying solution was realized in 2014.

Clearly it was pushing the limits of a small size ArduPilot copter.
This vision keeps inspiring us in our hardest work to craft the lightest and perfectly integrated full-featured ArduCopter.
We couldn’t imagine working in urban space with large copters and we couldn’t sleep peacefully with the idea of having just a poor flight time, as often happens in this class of super small copters.
Our best 5” full-featured ArduCopter
Last year we finalized our best 5” class ArduCopter quad , ready to be driven by our inhouse swarm GCS for drone light show.
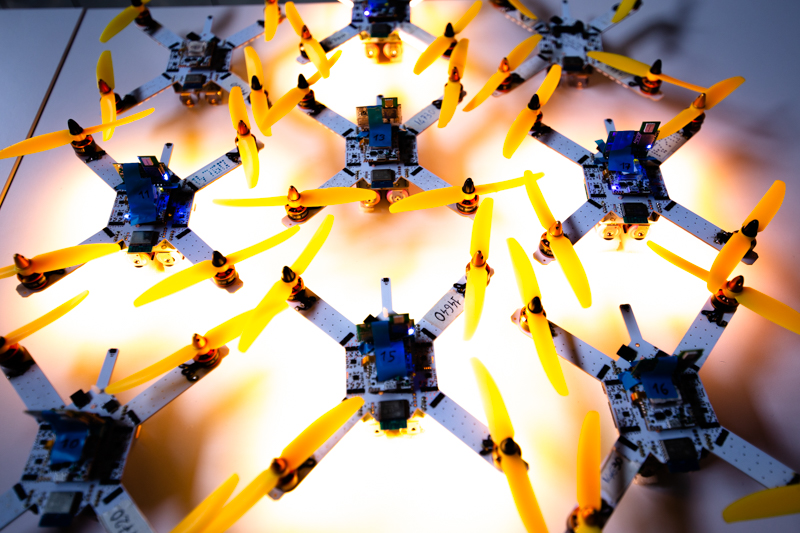
Our fleet of light performing copters is based on our optimized and finest design that every day has proven its abilities at work. We continue to do our best to enhance the tools and improve the quality and performance of our swarming choreography.
this is the final weight with battery and indoor localization addon (212g)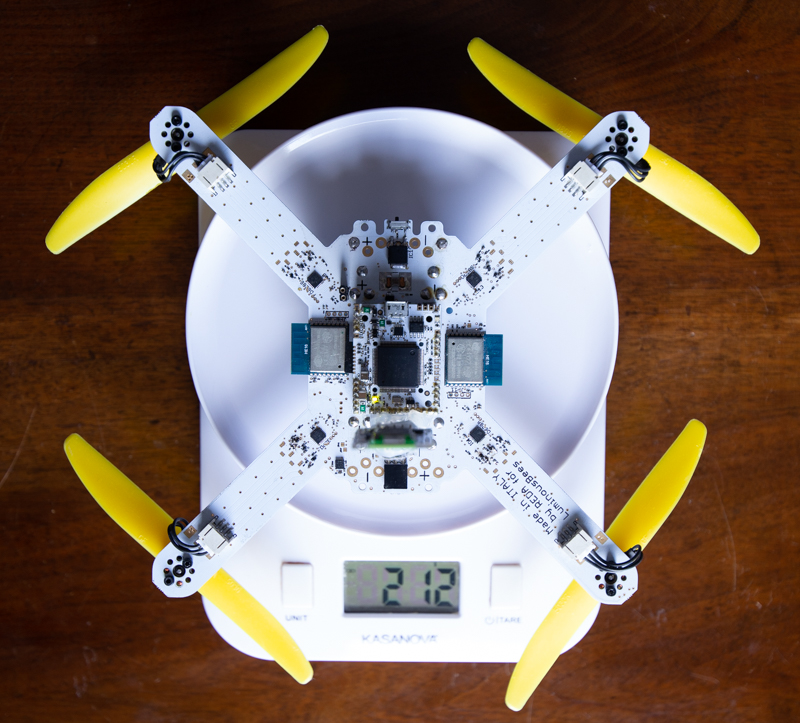
This extreme lightness gives to the luminousbee4 so relevant flight times and vibrant flight characteristics that we built our complete ecosystem for indoor and outdoor swarm applications around it.
Hover time:
2 x 18650 3600mAh 45 min small battery pack
2 x 21700 5000mAh more than 1h big battery pack
May 2019, state of the art outdoor solution
GPS RTK Ublox F9 perfect integration
Indoor positioning system
During our journey we also developed an UltraWideBand indoor localization to fulfill our needs of precision and scalability to be able to fly a swarm of drones.
Our solution is not as good as a motion capture system, BUT it is
- precise , starting from a 10cm error that can be tuned down to 3-5cm
- scalable , has no bottleneck on number of trackable objects
- light , the payload is less than 8 grams
- flexible , it can be set up to track in non square rooms or around obstacles
- and last but not least, it is way more cheaper than a mocap system
We want to share this solution and to improve it further with your help. We are refining this technology with all the bells and whistles, from a software tool to setup the positioning system to a beacon holder design.
Ground beacon and positioning tag add-on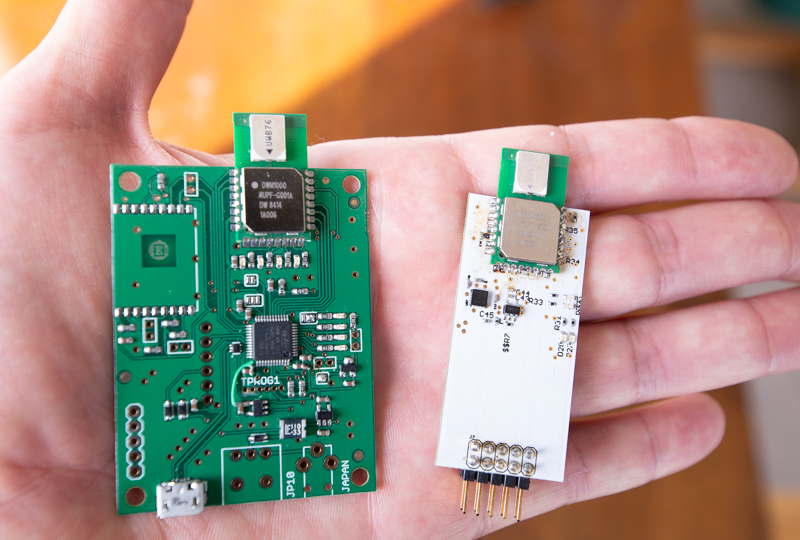
Till now we grew up through this amazing journey with ArduPilot. Now we got the inspiration with what we think could be our best way to contribute back supporting the community with our latest platform.
Our newest 3”
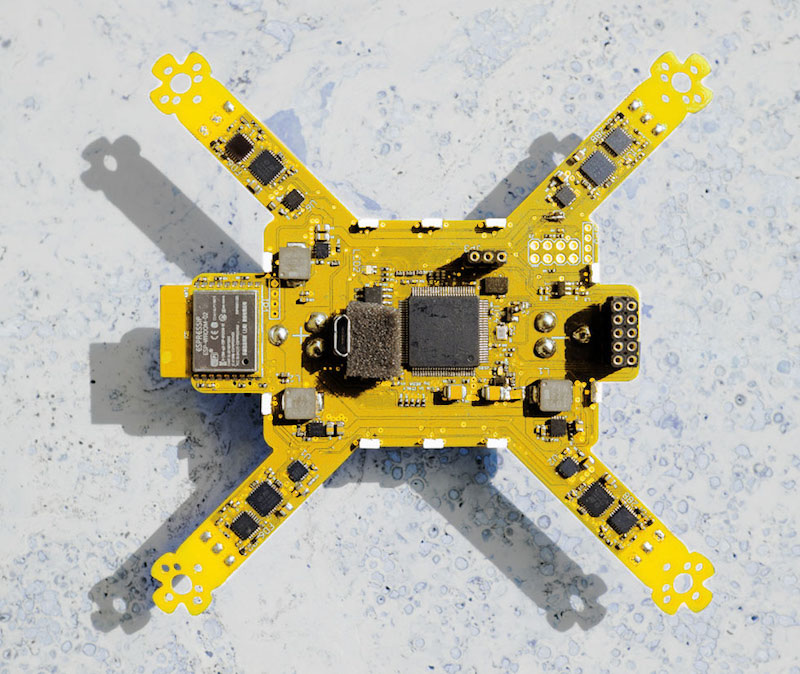
We want to present our lightest copter in the family, ArduBee .
October 2019, ArduBee-0.1 with plugin FC March 2020, ArduBee-0.2 weight test without and with battery (53g and 102g)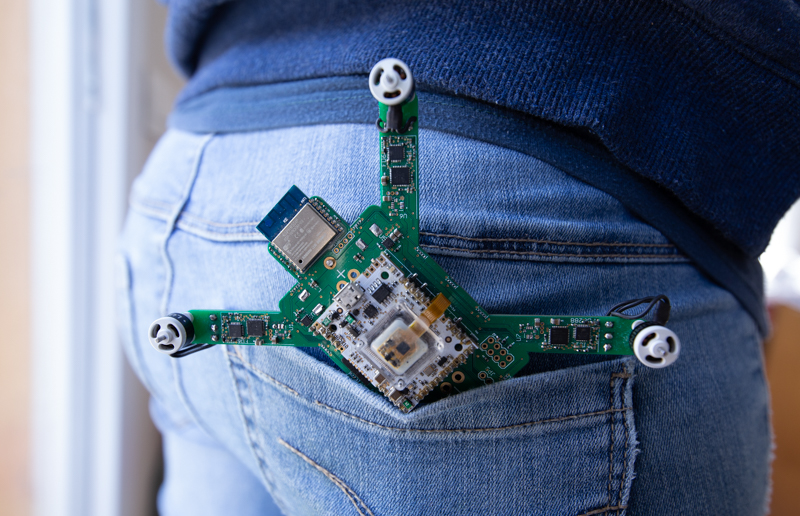


We imagine this could become an excellent 3” platform to enable everyone to start working fast on the more advanced ArduPilot capabilities without all the weakness of the standard frankenstein design and its associated weight and clumsiness.
We selected the best components available, optimized them at our best and manufactured in the finest single module, as small and light as possible.

On board:
- MCU 32-bit STM32F427 Cortex M4
- 4xBlHeli32 Esc with telemetry , individual motor’s RPM and current
- DSHOT 1200 flying every day with ArduCopter, hardware compatible up to 2400
- Li-ion 18650 removable battery
- WiFi ESP8266 for ArduPilot telemetry
- SD card slot for log and Lua scripting
- IMU , barometer , compass
- downward facing rangefinder for low altitude height above ground measurements
- SBus RC receiver connector
We aim to contribute to ArduPilot community with ArduBee, improving the development in this small class size and creating new opportunities with a platform ready for swarm robotics research and new applications .
The other main goal is to support and innovate the educational sector, using tiny ArduBee to teach and learn robotics, hardware, software and science with the open and robust ArduPilot’s environment.
We are finishing the development of several add-on boards:
- external camera
- 8 rangefinder module for easy collision avoidance
- propeller guards
- GPS module
- optical flow sensor
- indoor positioning with UWB suitable for single and swarm
- RGB LEDs board
- Breadboard with connectors for I2C, CAN, SPI, servo signals and power supply
The heart of this initiative is to give quality tools to the community, the final design is not yet closed and we ask your support to bring it to life .
Family portrait
We are going to launch a Kickstarter campaign in the next weeks, if you like this idea please share your suggestions or requirements and stay connected with ArduBee development.
https://forms.gle/ZjYc4HuLyF29zY8g6
If you have ideas and want to contact us at
luminousbees+ardubee@gmail.com
Stay up-to-date and follow our development blog in this post and here!
16 Likes
anbello (Andrea Belloni) #2
Hi Giorgio congratulations and all the best for this awesome project.
2 Likes
MartyMcFly (MartinKeilloh) #3
great project and very good luck with this,am taking a great interest in this project and may well purchase one
winstonsaz (Winston AZ) #4
Excellent work, good luck.
2 Likes
soldierofhell (soldierofhell) #5
What camera models are into consideration? Do you have plans for VIO?
3 Likes
tridge (tridge) #6
Looks really nice!
I have one of the 5" models and it flies very nicely in the ANU Vicon lab
2 Likes
NS_Rana (NS Rana) #8
Excellent design !
What is the PCB material and thickness ?
I am not sure if the type of the PCB material and its thickness is appropriate enough to provide enough strength to the frame in speed motion.
Hugues (Hugues) #9
Impressive lightness. I 've built a 3" with GPS and external magnetometer for 63g that flies about 30 minutes (see blog post here : 28 minutes flight time ! 3" sub 250 Arducopter )
If I may comment on your parts choices:
-F7 should be used instead of a F4. It does not weigh more and gives not only more future proof processing capability but also a direct Frsky passthrough telemetry capability without extra conversion electronics.
-Using one 18650 battery (instead of at least two) will not allow you to extend your mcrocopter with payloads such as cameras, companion boards or others. Your amperage limitation with one 18650 is a strong constraint.
-To not include a GPS in the integrated base design does not allow your copters to use the useful postionning modes of Ardupilot. It would only add a few grams, you should include it. And I’ve shown in my build you can get 30 min of autonomous flight time with it.
Very nice project and you’re onto Something. I would buy one (or more)
Best regards
Hugues
3 Likes
MartyMcFly (MartinKeilloh) #10
Hi Huges,I agree 100% with you,I will buy one as well (im in front of que) it is a great project and will be great when others get involved,can not wait for Giorio to ask for money for one.
Giorgio_Rinolfi (Giorgio Rinolfi) #11
Thanks everybody for your warm welcome to the ArduBee initiative!
We’ve received many good feedback and interest from the community and we are working hard to push the ArduBee development limits even further. The form to submit ideas is still open and we are very happy to receive feedback from more people.
MAIDEN FLIGHT
Here’s a brief video of the ArduBee-0.2 maiden flight!
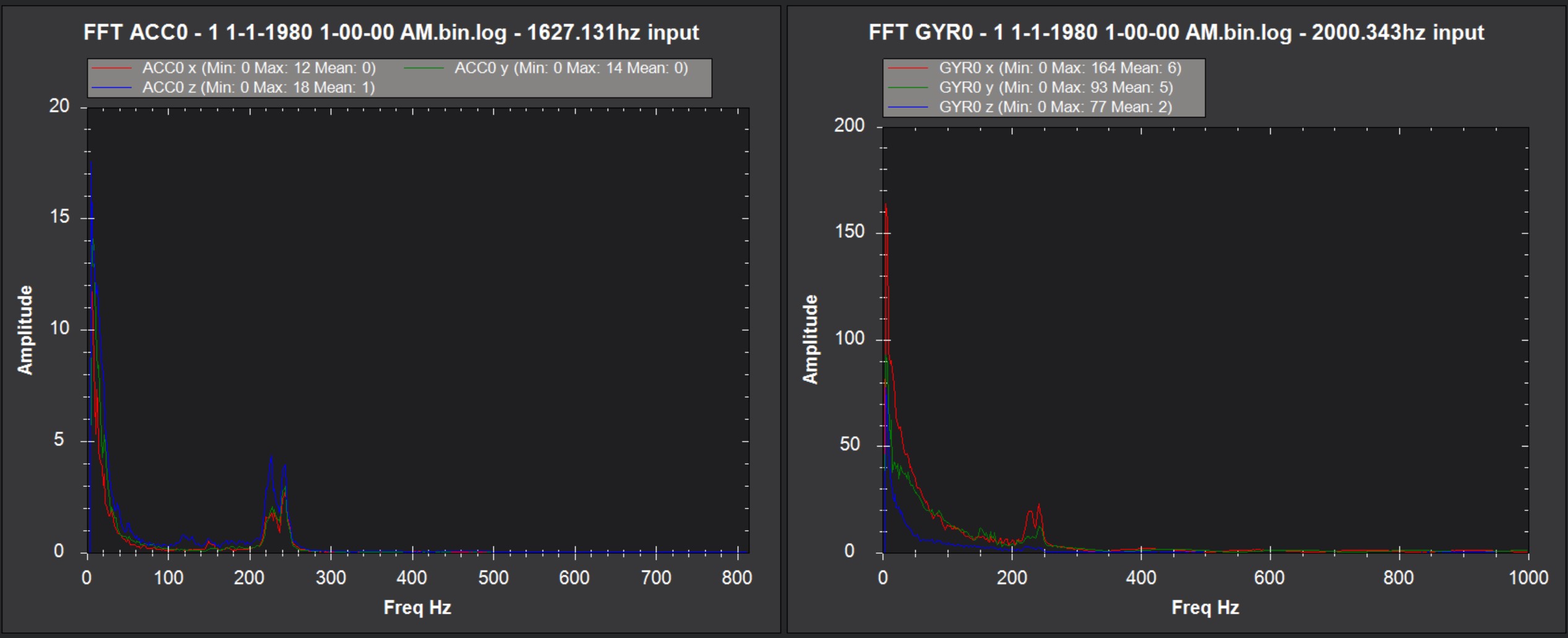
ArduBee is flying nicely in the air and only a slight, subtle humming can be heard.
I’ve just made a quick first gyro’s filtering with the basic throttle method for the Harmonic Notch filtering (thanks
@anypiper
), the PIDs are not yet tuned at all!
It has the main noise peak at 236Hz, this is the graph post filtering
MOTORS
We are designing the platform with different motors mounting holes patterns in order to offer a board-only version that will enable complete freedom to customize the motors and propellers selections for those who want to optimize for payload, speed or acceleration.
Furthermore depending on the application/scenario and if externally mounted devices are used, it’s possible to screw the motors above or below the board and can be connected either with solder pads or a connector suited for dedicated motors, which we are manufacturing with our specialized partner.
luminousbee4 motors connector

BATTERY
Another important aspect is that the battery is so easily swappable, you need only a common Li-Ion 18650 without ANY modification . You can use an existing Li-Ion recharger or a charger (with Li-Ion program) with an XT60 connector.
ArduBee Battery holders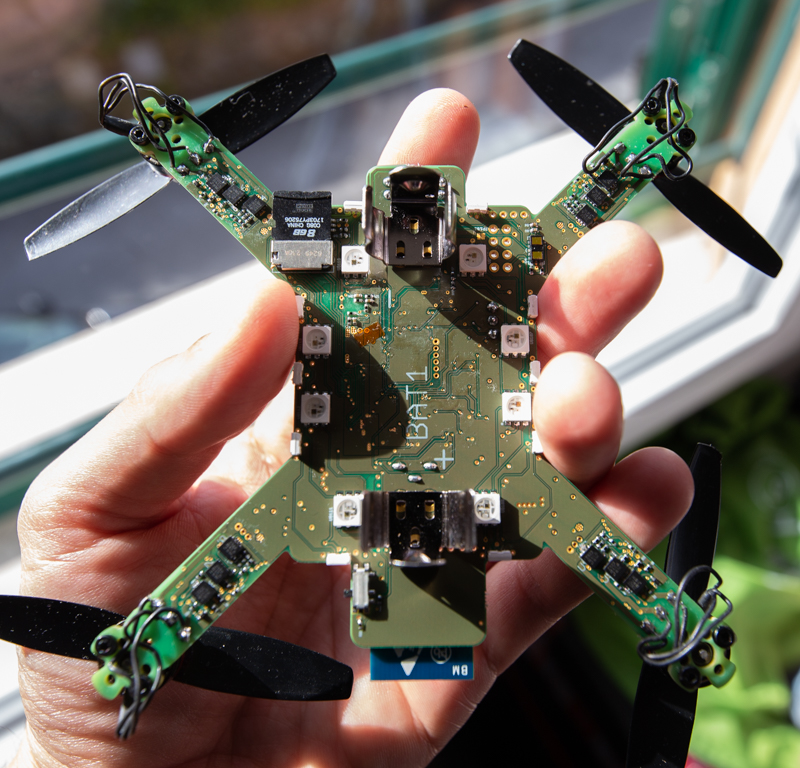
PROPELLER GUARDS
We are designing the best compromise between lightness, efficiency and robustness for the Ardubee’s protection . We are still working on this and we will be happy to show you our design very soon.
The actual prototype is a 1,6 mm thick PCB. Surface finiture is golden ENIG.
It’s also worth mentioning that we used the same PCB thickness in our 220g 5” version everyday for 2 years and in all the crashes we’ve experienced (a lot during intense swarm tests :D) just little harm was received by the board. Keep in mind that this is a much smaller and lighter drone so proportionally it will be more robust and moreover it will have an additional protection addon.
LOCALIZATION ADDONS
We are developing the GPS module as the UWB module for the autonomous capabilities as plug-in modules , they will be the lightest possible , perfectly integrated modules .
This is aligned with one of the core concepts of ArduBee: flexibility.
Don’t worry, we are already devoted to this add on concepts from all our in-house 5’’ fleet.
CAMERA ADDON
We still need to find the most interesting simple camera to support (for FPV or photos), and an advanced camera module to enable computer vision capabilities. If you have experience in this area, please get in touch! We would love to learn from you!
To enable camera tasks and other kinds of research we’re thinking about offering off-the-shelf support to the Raspberry Pi Zero as a companion computer.
What do you think? If you like to share your suggestions don’t hesitate to comment here, this is a tool for the community!
If you haven’t already done it, please fill the following form to receive updates on the Kickstarter launch and to be involved in the development.
4 Likes
anbello (Andrea Belloni) #12
Camera Add-on for ArduBee
As for the camera add-on, as Giorgio says, it will be necessary to provide one for FPV applications (simpler) and one for Computer Vision applications (more complex).
Camera Add-on for FPV
We can imagine two solutions, one analog and one digital.
The analogue one is simple, there are many options on the market to choose a camera and a 5.8GHz VTX. Solutions such as the Hawkeye Firefly Split Mini 4K may also be interesting () to have 1080p or 4K video saved on SD and at the same time the analogue video signal transmitted in real time via VTX at 5.8GHz.
For the digital solution for FPV an interesting project is OpenHD which needs a Raspberry Pi zero in the air, a Raspberry Pi 3 on the ground and a WiFi-Broadcast connection. “WiFi-Broadcast tries to imitate the famous properties of an analog link like graceful signal degradation and no association between the endpoints.” In this way, the same channel can also be used for bidirectional telemetry and radio control.
Camera Add-on for Computer Vision
Here things get complicated, to have sufficient processing capacity for this type of applications (Visual Odometry, SLAM, depth map estimation for navigation and collision avoidance, …) you need powerful SBCs therefore bulky, heavy and with high power needs.
We need a card as powerful as the Raspberry Pi 4 but more compact, and light. So far I have not found anything like this. NanoPi NEO2 Black is compact and light but is comparable to a Raspberry Pi 3. Some tests could be done.
As an alternative, which is a bit of a compromise, I propose to try a module based on the Kendryte K210 with included camera like this: Sipeed M1n Module AI Development Kit . This board is very compact, light, needs little power and is really cheap.
I have to say I don’t think that with K210 based board we can do computational intensive applications such as Visual Odometry and SLAM but it could be used to make interesting experiments with convolutional neural networks because of the KPU CNN accelerator. Maybe one application could be object detection and tracking for target following and similar tasks.
There are several other cards based on Kendryte K210 of different formats:
I have a Maixduino with which I started to do some tests and I ordered a Sipeed M1n Module AI to try to put it on my 3 inch copter.
Main features of K210 based boards:
- CPU: RISC-V Dual Core 64bit, with FPU and KPU CNN Accelerator
- Image Recognition: QVGA@60fps/VGA@30fps
- OS: FreeRTOS
- NN Model: TinyYOLOv2 (after pruned)
- DNN Framework: TensorFlow/Keras/Darknet
- Peripherals FPIOA/UART/GPIO/SPI/I²C/I²S/WDT/TIMER/RTC, etc.
- Power consumption of typical application scenarios < 1W
- Power consumption of chip < 300mW
The K210 supports several programming environments:
- The K210’s official SDK supports two development modes: FreeRTOS and Standalone. You can download SDK Programming Guide here
- Moreover Arduino IDE can be used as development environment using ArduinoCore-k210
- Another interesting option to develop for K210 is MaixPy a porting of MicroPython to K210 and the MaixPyIDE based on OpenMV IDE. MaixPy can be used with or without OpenMV API.

Documentation on development systems is far from complete, follows some link that cloud help:
- Getting Started from CNX Software ( https://www.cnx-software.com/2019/08/21/getting-started-with-sipeed-m1-based-maixduino-board-grove-ai-hat-for-raspberry-pi/ )
- This instructable on Transfer Learning ( https://www.instructables.com/id/Transfer-Learning-With-Sipeed-MaiX-and-Arduino-IDE/ )
- Sipeed bbs ( https://en.bbs.sipeed.com )
3 Likes
guglie (Guglie) #13
On the computer vision it seems that advanced navigation tasks (DroNet) have been run completely onboard on very little processors (e.g. GAP8 – Ultra low power 9 core RISC-V MCU) like the one from the PULP platform with a Himax HM01B0 camera (Ultra low power 320×320 grayscale @ 60fps)
GAP8 seems to have a built in tool to convert neural networks trained in python to their embedded platform. Do you think it is too much underpowered?
I’ve also seen usage of FPV cameras for AI research with offboard control on ROS.
What about JeVois and OpenMV?
By the way the K210 seems a very good option…
2 Likes
3Denis (Denis) #14
Great project! Can you give some more details of your UWB positioning system? What size of space can it cover? And is it already running or just planned / in development?
2 Likes
guglie (Guglie) #15
Thank you@3Denis,
the UWB positioning system is already running. We’ve developed and used it internally for our swarm since 2018. Below you can see a video made with it and the ArduBee’s 5’’ big brother. As part of the Kickstarter campaign we’re planning to continue to improve it and to develop the tools needed to configure the system, to make it usable by everybody, not only UWB experts.
The size it can cover is related to multiple factors, your country regulations on radio transmit power, frequency, obstacles, etc. Frequency and power are configurable. We tested our system with 8 beacons in a box configuration of up to 10 x 16 x 8 meters (greater diagonal = 20m) without problems. Up to 25m diagonal should be fairly easy, 30-35m a little harder. We’ve read of people using the same DWM1000 module with standard antenna that reached hundreds of meters of range, but using some configurations that reduce a lot the accuracy and update rate of a localization system, but you’ll be able to try out the options yourself.
Apart from the refactoring and tools, we’re going to improve the algorithm to allow additional beacons in order to cover larger spaces, virtually without limits if you place beacons, let’s say, every 20 meters.
The position is calculated within the firmware and is not dependent on vehicle code, so it should be usable on every ArduPilot vehicle (but I suspect it wont be of much use in ArduSub ). Some optimization can be done for rovers, assuming 2D motion.
If you have more questions feel free to ask!
2 Likes
以上就是本文的全部内容,希望本文的内容对大家的学习或者工作能带来一定的帮助,也希望大家多多支持 码农网

本站部分资源来源于网络,本站转载出于传递更多信息之目的,版权归原作者或者来源机构所有,如转载稿涉及版权问题,请联系我们。

About Face 3
Alan Cooper、Robert Reimann、David Cronin / John Wiley & Sons / 2007-5-15 / GBP 28.99
* The return of the authoritative bestseller includes all new content relevant to the popularization of how About Face maintains its relevance to new Web technologies such as AJAX and mobile platforms......一起来看看 《About Face 3》 这本书的介绍吧!


